Optimizimi i performancës me MPU-6050: Konfigurimi, Kalibrimi dhe Aplikimet
2024-04-25
9251
MPU-6050 është komponenti i parë i përpunimit të lëvizjes me 6 boshte të integruar në botë, i cili integron një gyroskop me 3 boshte, përshpejtues 3-aksesh dhe një procesor dixhital të shkallëzueshëm të lëvizjes (DMP).Qëllimi i përdorimit të tij është të merret këndi i prirjes së objektit që do të matet (siç është një quadkopter, një makinë balancuese) në boshtet X, Y dhe Z, domethënë, këndi i katranit, këndi i rrotullimit dhe këndi i nofullës.Ne lexojmë gjashtë të dhënat e MPU-6050 (vlera e AD për përshpejtimin e tre boshteve dhe vlera e AD me shpejtësi këndore me tre boshte) përmes ndërfaqes I2C.Pas përpunimit të bashkimit të sjelljes, këndet e katranit, rrotullimit dhe yaw mund të llogariten.Si një referencë e drejtuar për vlerat e matjes, përkufizimi i drejtimit të koordinatave të sensorit është siç tregohet në figurën më poshtë, i cili ndjek parimin e sistemit të koordinatave të dorës së djathtë (d.m.th., gishti i djathtë tregon drejtimin pozitiv të X-Boshti, gishti i indeksit tregon drejtimin pozitiv të boshtit y, dhe gishti i mesëm tregon drejtimin pozitiv të drejtimit të boshtit z).
Katalog

Me autobusin e tij të dedikuar të sensorit I2C, MPU-6050 është në gjendje të marrë hyrje direkt nga një busull i jashtëm me 3 boshte, duke siguruar një dalje të plotë me 9 boshte MotionFusion.Ai eliminon problemin e mospërputhjes midis gyroskopit të kombinuar dhe afatit kohor të përshpejtuesit dhe zvogëlon ndjeshëm hapësirën e paketimit në krahasim me zgjidhjet me shumë përbërës.Kur lidhet me një magnetometër me tre boshte, MPU-60x0 është i aftë të sigurojë dalje të plotë të shkrirjes së lëvizjes me 9 boshte në portin e tij kryesor I2C ose SPI (vini re se porti SPI është i disponueshëm vetëm në MPU-6000).
Alternativa dhe ekuivalentët
- MPU-3300
- MPU-6000
- MPU-6500
Prodhuesi i MPU-6050
Prodhuesi i MPU-6050 është TDK.Pasi të dy themeluesit e TDK, Dr. Yogoro Kato dhe Takei Takei, shpikën Ferrite në Tokio, ata themeluan Tokio Denkikagaku Kogyo K.K.Në vitin 1935. Si një markë globale e industrisë së elektronikës, TDK gjithmonë ka mbajtur një pozicion mbizotërues në fushat e lëndëve të para elektronike dhe përbërësve elektronikë.Portofoli i produkteve gjithëpërfshirëse dhe të drejtuara nga inovacioni i TDK-së mbulon komponentë pasivë si kondensatorë qeramikë, kondensatorë elektrolitikë alumini, si dhe kondensatorë filmi, produkte magnetike, përbërës me frekuencë të lartë, pajisje piezoelektrike dhe mbrojtëse, si dhe sensorë dhe sisteme sensori (siç janë temperatura dhe presioni, komponentëtSensorët magnetikë dhe MEMS), etj. Përveç kësaj, TDK gjithashtu siguron furnizime me energji elektrike dhe pajisje energjetike, koka magnetike dhe produkte të tjera.Markat e saj të produkteve përfshijnë TDK, EPCO, Invensense, Micronas, Tronics dhe TDK-Lambda.
Diagrami i brendshëm i bllokut të MPU-6050
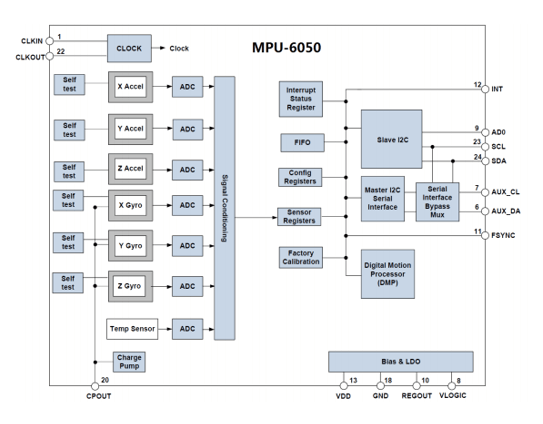
Midis tyre, SCL dhe SDA janë ndërfaqet IIC të lidhura me MCU, dhe MCU kontrollon MPU-6050 përmes kësaj ndërfaqe IIC.Ekziston edhe një ndërfaqe IIC, përkatësisht aux_cl dhe aux_da.Kjo ndërfaqe mund të përdoret për të lidhur pajisjet e jashtme të skllevërve, siç janë sensorët magnetikë, për të formuar një sensor nëntë boshti.Vlogic është tensioni i portit IO.Kjo pin mund të mbështesë një minimum prej 1.8V.Ne zakonisht e lidhim atë direkt me VDD.AD0 është kunja e kontrollit të adresës së ndërfaqes skllave IIC (e lidhur me MCU).Kjo pin kontrollon pjesën më të ulët të adresës IIC.Nëse është e lidhur me GND, adresa IIC e MPU-6050 është 0x68;Nëse është e lidhur me VDD, është 0x69.Ju lutemi vini re se adresa këtu nuk përfshin pjesën më të ulët të transmetimit të të dhënave (pjesa më e ulët përdoret për të përfaqësuar operacionet e leximit dhe shkrimit).Në MWBalancedSTC15, AD0 është e lidhur me GND, kështu që adresa IIC e MPU-6050 është 0x68 (duke përjashtuar pjesën më të ulët).
Inicializoni ndërfaqen IIC
MPU-6050 përdor IIC për të komunikuar me STC15, kështu që ne duhet të inicializojmë së pari linjat e të dhënave SDA dhe SCL të lidhura me MPU-6050.
Rivendosni MPU-6050
Ky hap rikthen të gjithë regjistrat brenda MPU-6050 në vlerat e tyre të paracaktuar, e cila arrihet duke shkruar 1 në BIT7 të Regjistrit të Menaxhimit të Energjisë 1 (0x6b).Pas rivendosjes, Regjistri i Menaxhimit të Energjisë 1 do të rikthehet në vlerën e paracaktuar (0x40), dhe kjo regjistër duhet të vendoset më pas në 0x00 për të zgjuar MPU-6050 dhe ta vendosë atë në gjendje normale të punës.
Vendosni gamën në shkallë të plotë të sensorit të shpejtësisë këndore (GYRO) dhe sensorit të nxitimit
Në këtë hap, ne vendosëm gamën në shkallë të plotë (FSR) të dy sensorëve përmes Regjistrit të Konfigurimit të Gyroskopit (0x1b) dhe Regjistrit të Konfigurimit të Sensorit të Përshpejtimit (0x1c) respektivisht.Në mënyrë tipike, ne vendosëm gamën në shkallë të plotë të gyroskopit në ± 2000dps dhe gamën në shkallë të plotë të përshpejtuesit në ± 2g.
Vendosni parametra të tjerë
Këtu, ne gjithashtu duhet të konfigurojmë parametrat e mëposhtëm: të fikni ndërprerjet, të çaktivizoni ndërfaqen AUX I2C, të çaktivizoni FIFO, të vendosni nivelin e marrjes së mostrave të gyroskopit dhe të konfiguroni filtrin dixhital të ulët të kalimit (DLPF).Meqenëse ne nuk përdorim ndërprerje për të lexuar të dhëna në këtë kapitull, funksioni i ndërprerjes duhet të fiket.Në të njëjtën kohë, pasi ne nuk jemi duke përdorur ndërfaqen AUX I2C për të lidhur sensorë të tjerë të jashtëm, ne gjithashtu duhet të mbyllim këtë ndërfaqe.Këto funksione mund të kontrollohen përmes regjistrit të aktivizimit të ndërprerjes (0x38) dhe regjistrit të kontrollit të përdoruesit (0x6a).MPU-6050 mund të përdorë FIFO për të ruajtur të dhënat e sensorit, por ne nuk i kemi përdorur ato në këtë kapitull, kështu që të gjitha kanalet FIFO duhet të mbyllen.Kjo mund të kontrollohet përmes Regjistrit FIFO Enable (0x23).Si parazgjedhje, vlera e këtij regjistri është 0 (d.m.th., FIFO është e çaktivizuar), kështu që ne mund të përdorim vlerën e paracaktuar direkt.Shkalla e marrjes së mostrave të gyroskopit kontrollohet nga Regjistri i Ndarjes së Shkallës së Kampionimit (0x19).Normalisht, ne e vendosëm këtë normë të marrjes së mostrave në 50. Konfigurimi i filtrit dixhital me kalim të ulët (DLPF) është përfunduar përmes regjistrit të konfigurimit (0x1a).Në përgjithësi, ne do ta vendosim DLPF në gjysmën e gjerësisë së bandës për të balancuar saktësinë e të dhënave dhe shpejtësinë e përgjigjes.
Konfiguroni burimin e orës së sistemit dhe aktivizoni sensorin e shpejtësisë këndore dhe sensorin e nxitimit
Vendosja e burimit të orës së sistemit varet nga regjistri i menaxhimit të energjisë 1 (0x6b), ku tre bitet më të ulëta të këtij regjistri përcaktojnë zgjedhjen e burimit të orës.Si parazgjedhje, këto tre bite janë vendosur në 0, që do të thotë se sistemi përdor oshilatorin e brendshëm 8MHz RC si burim orësh.Sidoqoftë, për të përmirësuar saktësinë e orës, ne shpesh e vendosim atë në 1 dhe zgjedhim gyroskopin X-Axis si burimin e orës.Për më tepër, mundësimi i sensorit të shpejtësisë këndore dhe sensori i nxitimit është gjithashtu një hap i rëndësishëm në procesin e inicializimit.Të dy operacionet zbatohen përmes regjistrit të menaxhimit të energjisë 2 (0x6c).Thjesht vendosni bitin përkatës në 0 për të aktivizuar sensorin përkatës.Pas përfundimit të hapave të mësipërm, MPU-6050 mund të hyjë në statusin normal të punës.Ato regjistra që nuk janë vendosur posaçërisht do të miratojnë vlerat e paracaktuar të paracaktuar nga sistemi.
Si funksionon MPU-6050?
Gyro sensor
Sensori është i pajisur me një gyro brenda, i cili gjithmonë do të mbetet paralel me drejtimin fillestar për shkak të efektit gyroskopik.Prandaj, ne mund të llogarisim drejtimin dhe këndin e rrotullimit duke zbuluar devijimin e gyro nga drejtimi fillestar.
Sensor i përshpejtuesit
Një sensor përshpejtues është një pajisje që mund të matë nxitimin dhe funksionon bazuar në parimin e efektit piezoelektrik.Gjatë nxitimit, sensori mat forcën inerciale të aplikuar në bllokun e masës dhe më pas llogarit vlerën e nxitimit duke përdorur ligjin e dytë të Njutonit.
Procesori i Lëvizjes Dixhitale (DMP)
DMP është një modul i përpunimit të të dhënave në çipin MPU6050 që ka një algoritëm të integruar të filtrimit Kalman për marrjen e të dhënave nga sensorët e gyroskopit dhe përshpejtuesit dhe përpunimin e kuaternioneve të daljes.Kjo veçori zvogëlon në masë të madhe ngarkesën e punës së mikroprocesorit periferik dhe shmang procesin e lodhshëm të filtrimit dhe shkrirjes së të dhënave.
Shënime:
Kuaternions: Kuaternions janë numra të thjeshtë super -kompleksi.Numrat komplekse përbëhen nga numra realë plus njësinë imagjinare I, ku i^2 = -1.
Ku përdoret MPU-6050?
- Lodra
- Celulari dhe lojërat e lëvizshme
- Kontrolluesit e lojërave të bazuara në lëvizje
- BLURFREE ™ Teknologjia (për stabilizimin e figurës së videos/ende të imazhit)
- Teknologjia AirSign ™ (për sigurinë/vërtetimin)
- Njohja e gjestit ™ IG ™ IG
- Sensorë të veshur për shëndet, palestër dhe sport
- Korniza e lojës dhe aplikimit të aktivizuara me lëvizje
- MotionCommand ™ Teknologjia (për shkurtime të shkurtra të gjesteve)
- Shërbimet e bazuara në vendndodhje, pikat e interesit dhe llogaritja e vdekur
- Kontrollet e telekomandës 3D për DTV -të e lidhura me Internetin dhe Set kutitë e sipërme, minjtë 3D
- Teknologjia e Touchanywhere ™ (për kontrollin/navigimin e aplikacionit "pa prekje"))
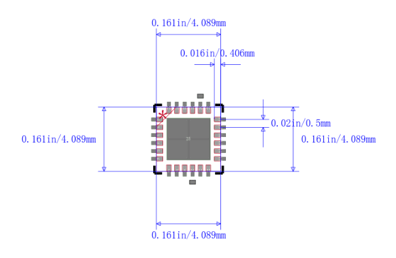
Paketa e MPU-6050
Si të zvogëloni zhurmën e MPU-6050?
Ne mund të marrim mënyrat e mëposhtme për të zvogëluar zhurmën e MPU-6050.
Përdorni sensorë të kalibruar
Kalibrimi i përshpejtuesit dhe gyroskopi i MPU-6050 mund të eliminojë paragjykimin dhe gabimin e vetë sensorëve, duke zvogëluar kështu efektin e zhurmës.Procesi i kalibrimit zakonisht përbëhet nga dy faza: kalibrimi statik dhe kalibrimi i lëvizjes.
Procesi i filtrimit të harduerit
Shtimi i kondensatorëve të filtrit në linjën e energjisë së MPU-6050 mund të zvogëlojë ndikimin e zhurmës së furnizimit me energji në sensor.Ndërkohë, gjatë paraqitjes së PCB, ne duhet të përpiqemi ta mbajmë MPU-6050 larg burimeve të mundshme të ndërhyrjes, siç janë linjat e sinjalit me frekuencë të lartë dhe përbërësit me fuqi të lartë.
Përpunimi i filtrimit të softuerit
Pas mbledhjes së të dhënave të papërpunuara nga MPU-6050, ne mund të shtojmë një lidhje të filtrimit të softuerit për të para-përpunuar të dhënat fillestare për të eleminuar ndërhyrjen e shkaktuar nga zhurma.Metodat e filtrimit të softuerit të përdorura zakonisht përfshijnë filtrimin mesatar, filtrimin mesatar, filtrimin Kalman etj.
Përdorni filtrin e brendshëm të kalimit të ulët
MPU-6050 ka një filtër të brendshëm të integruar dixhital të ulët, i cili mund të përdoret për të zvogëluar zhurmën me frekuencë të lartë duke vendosur frekuencën e tij të ndërprerjes.Në mënyrë të veçantë, ne mund të vendosim frekuencën e ndërprerjes së filtrit dixhital duke modifikuar regjistrin e konfigurimit të MPU-6050 për të eleminuar zhurmën me frekuencë të lartë të shkaktuar nga marrja e mostrave A/D.
Llogaritja e trajektores së lëvizjes me bazë MPU-6050
MPU-6050 është një përshpejtues me gjashtë boshte dhe sensor i gyroskopit që mund të përdoret për të matur lëvizjen dhe qëndrimin e objekteve.Llogaritja e trajektores së lëvizjes bazuar në MPU-6050 mund të realizohet nga hapat e mëposhtëm:
Hapi i parë është të lexoni të dhënat e sensorit.Ne duhet të lexojmë të dhënat e përshpejtuesit dhe gyroskopit nga sensorët MPU-6050 duke përdorur drejtuesit e duhur dhe funksionet e bibliotekës.Këto të dhëna zakonisht dalin në një format dixhital, kështu që kërkohet disa punë të konvertimit dhe kalibrimit për t'i kthyer ato në matjet aktuale në njësitë fizike.
Hapi i dytë është llogaritja e nxitimit.Së pari, duhet të përpunojmë të dhënat nga përshpejtuesi për të nxjerrë nxitimin e objektit në secilin bosht.Më pas, për të llogaritur shpejtësinë dhe zhvendosjen e objektit në secilin bosht, duhet të integrojmë të dhënat e nxitimit.Teknikat numerike të integrimit, siç është metoda e Euler ose metoda e Lunger-Kutta, shpesh përdoren në këtë proces për të siguruar saktësinë e llogaritjeve të zhvendosjes.
Hapi i tretë është llogaritja e shpejtësisë këndore.Duke përdorur të dhënat e gyroskopit, mund të llogaritet shpejtësia këndore e objektit në secilin bosht.Përsëri, këto të dhëna duhet të kalibrohen dhe konvertohen për të marrë shpejtësinë këndore në njësitë fizike aktuale.
Hapi i katërt është llogaritja e rrotullimit.Duke integruar të dhënat e shpejtësisë këndore, këndi i rrotullimit të objektit në secilin bosht mund të llogaritet.Kjo mund të bëhet duke përdorur teknika numerike të integrimit siç është metoda e Euler ose metoda Longe-Kutta për të llogaritur këndin.
Hapi i pestë është bashkimi i të dhënave.Ne i kombinojmë të dhënat nga përshpejtuesit dhe gyroskopët për të marrë qëndrimin e plotë dhe informacionin e pozicionit të objektit.Kjo mund të bëhet duke përdorur algoritme të tilla si zgjidhësi i qëndrimit të bazuar në kuaternion ose zgjidhësi i këndit Euler.
Hapi i gjashtë është të vizualizoni rezultatet.Ne e shndërrojmë trajektoren e lëvizjes së objektit të llogaritur në një grup pikësh në një sistem koordinativ 3D dhe e shfaqim atë duke përdorur mjete të përshtatshme vizualizimi për një kuptim më intuitiv të trajektores së lëvizjes së objektit dhe ndryshimeve të qëndrimit.
Pyetjet e bëra më shpesh [FAQ]
1. Sa e saktë është MPU6050?
Rezultatet e fituara treguan saktësi të mjaftueshme prej më pak se 1 % dhe besueshmëri, duke siguruar dimensionimin e duhur të boshtit të ashensorit dhe standardet e larta të industrisë së ashensorit.
2. Si të lexoni të dhëna nga MPU6050?
Për të lexuar regjistrat e brendshëm MPU6050, Master dërgon një gjendje fillestare, e ndjekur nga adresa e skllavit I2C dhe një shkrim shkrimi, dhe pastaj adresa e regjistrit që do të lexohet.
3. Ku përdoret MPU6050?
Në pajisjet e veshura për ndjekjen e shëndetit, për ndjekjen e fitnesit.Në dronët dhe quadcopters, MPU6050 përdoret për kontrollin e pozicionit.Përdoret në kontrollin e krahut robotik.Pajisjet e kontrollit të gjesteve të duarve.
4. A është MPU6050 një IMU?
Blloku i sensorit MPU6050 IMU lexon të dhëna nga sensori MPU-6050 që është i lidhur me pajisjen.Blloku prodhon nxitimin, shkallën këndore dhe temperaturën përgjatë boshteve të sensorit.
5. Cili është përpunimi i MPU6050?
Ky është procesori në bord i MPU6050 që kombinon të dhënat që vijnë nga përshpejtuesi dhe gyroskopi.DMP është çelësi për të përdorur MPU6050 dhe shpjegohet në detaje më vonë.Ashtu si me të gjithë mikroprocesorët, DMP ka nevojë për firmware në mënyrë që të ekzekutohet.
testi i funksionit.Produktet më të larta me kosto efektive dhe shërbimi më i mirë është angazhimi ynë i përjetshëm.
Artikull i nxehtë
- Janë CR2032 dhe CR2016 të këmbyeshme
- MOSFET: Përkufizimi, Parimi i Punës dhe Përzgjedhja
- Instalimi dhe testimi i stafetave, interpretimi i diagrameve të instalimeve elektrike
- CR2016 vs CR2032 Cili është ndryshimi
- NPN vs PNP: Cili është ndryshimi?
- ESP32 vs STM32: Cili mikrokontrollues është më i mirë për ju?
- LM358 Udhëzues gjithëpërfshirës i amplifikatorit të dyfishtë operacional: Pinouts, diagrama qark, ekuivalente, shembuj të dobishëm
- CR2032 vs DL2032 vs CR2025 Udhëzues për krahasim
- Kuptimi i ndryshimeve ESP32 dhe ESP32-S3 Analiza Teknike dhe e Performancës
- Analizë e hollësishme e qarkut të serive RC
 Eksplorimi i aftësive dhe aplikimeve të çipit të komunikimit NRF24L01
Eksplorimi i aftësive dhe aplikimeve të çipit të komunikimit NRF24L01
2024-04-25
 MMBT3904 NPN Transistor: Specifikimet e tij, Udhëzuesi Gjithëpërfshirës i Aplikimit dhe MMBT3904 vs MMBT5551
MMBT3904 NPN Transistor: Specifikimet e tij, Udhëzuesi Gjithëpërfshirës i Aplikimit dhe MMBT3904 vs MMBT5551
2024-04-25
Numri i nxehtë i pjesës së nxehtë
 04025A330JAT2A
04025A330JAT2A C2012X7R1C684M125AA
C2012X7R1C684M125AA GRM188R72D222KW07D
GRM188R72D222KW07D CC0805KRX7R8BB332
CC0805KRX7R8BB332 08051C103MAT4A
08051C103MAT4A- 08051A1R0CAT2M
 GRM21BC81H475ME11K
GRM21BC81H475ME11K- LD023A101FAB2A
 1808CC123KATME
1808CC123KATME EMK042CG560JC-FW
EMK042CG560JC-FW
- 293D106X9020B2TE3
- R5F2M122ANSP#U0
- VE-JN4-MY
- RC0402FR-0720RL
- NR4018T2R2M
- USB3503/ML
- IR3477MTRPBF
- MAX5066EUI+T
- MB90347DASPFV-GS-485E1
- 6MBP25RC120-01
- HCPL2630
- XC5VLX110T-1FFG1136C
- XC6SLX75-L1CSG484I
- F971A107MCC
- STPS2L40U
- TLV2774IPWRG4
- STPS80170CW
- LM5116MHX
- T491C107K010ATPLP1
- WJLXT971ALC
- BTS5236-2GS
- EPM7256SQI208-15
- LC4064C-25TN-5I
- LC66506B-4G96
- MC14516BCP
- MN101C527CD
- SST39LF020-45-4C-NH
- TA1235FN
- AIC1527-0
- EP3C120F780C8NAE
- OM6361ET22UM
- TDK78P7200-1H
- NT5CB128M16IP-EKI
- UPD63712BGC-8EU
- THS4521IDGK
- APM4008NUC-TRG
- TPS62913RPUR
- R7F7016903AFP-C#BA1
- SDBB-25S